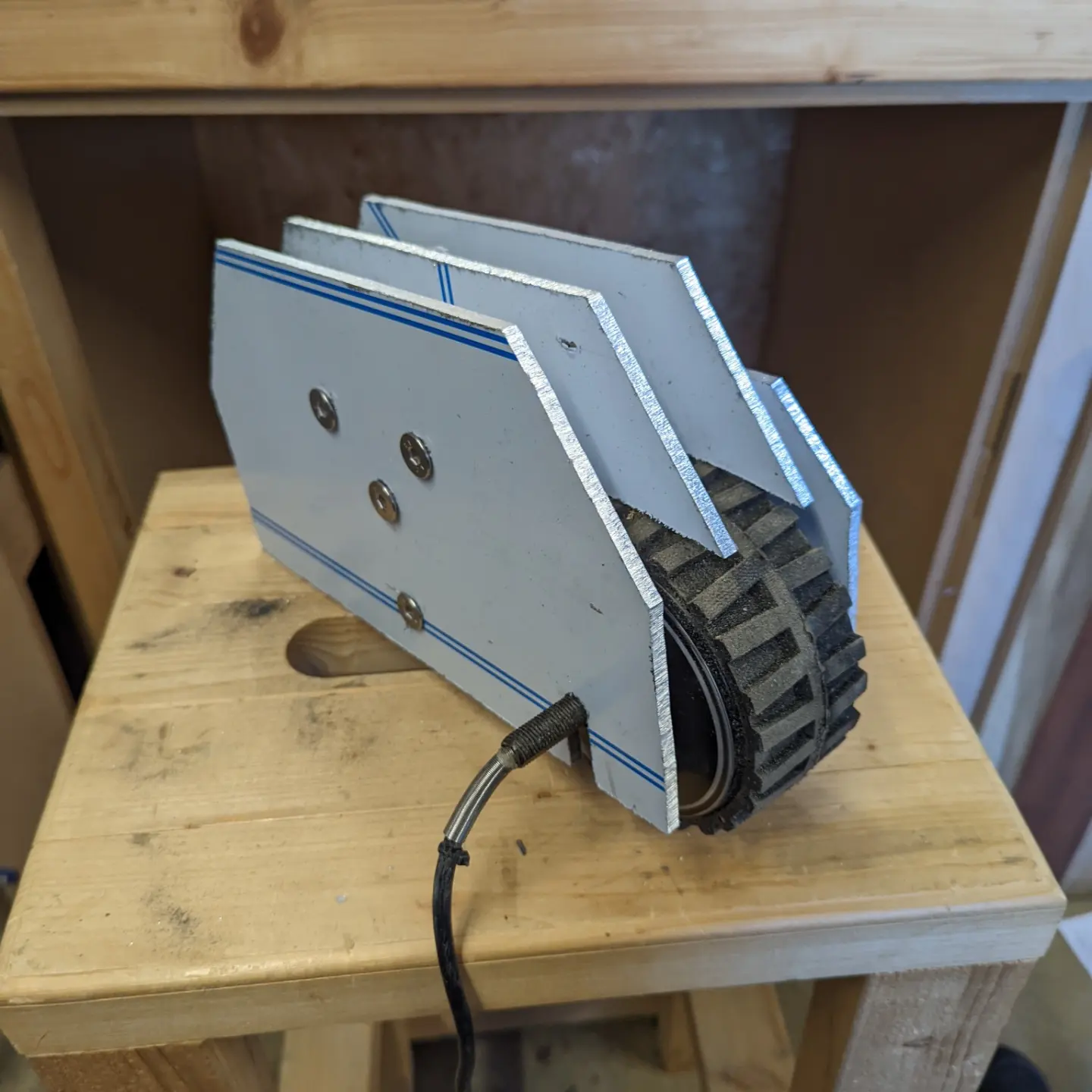
Styrene frame, reinforced
I haven't done many updates on Droid 2 for a while. Besides the Q85 drives, the work has mostly stalled due to other projects. However, I realised I haven't done…
0 Comments
October 29, 2022

I haven't done many updates on Droid 2 for a while. Besides the Q85 drives, the work has mostly stalled due to other projects. However, I realised I haven't done…

Whilst printing is going slowly (currently got 5 frame pieces done, and printing the first circle) I got the latest version of the BB8 motherboard delivered this morning. I soldered…

So, after BB8 sat with not much happening to it, I recently got a new RC controller and decided to reawaken the project. Where had I got to? I've had…
The newer Q85 brushless drives are fast becoming a popular method for powering a droid, replacing the more standard brushed scooter motor (tho of course, we're builders so anything goes…

One of the things I advocate is the use of a big relay on your foot drives. Disconnecting the motors from the Sabertooth means that the droid can be pushed…
The Astropixels sets are just bare bones electronics with no mounting hardware or such like. This is because there are so many different options and ways to attach them to…

Here I'll walk you through how to change a few aspects of your Astropixel setup so you can fine tune the settings to your liking. First step, you will need…
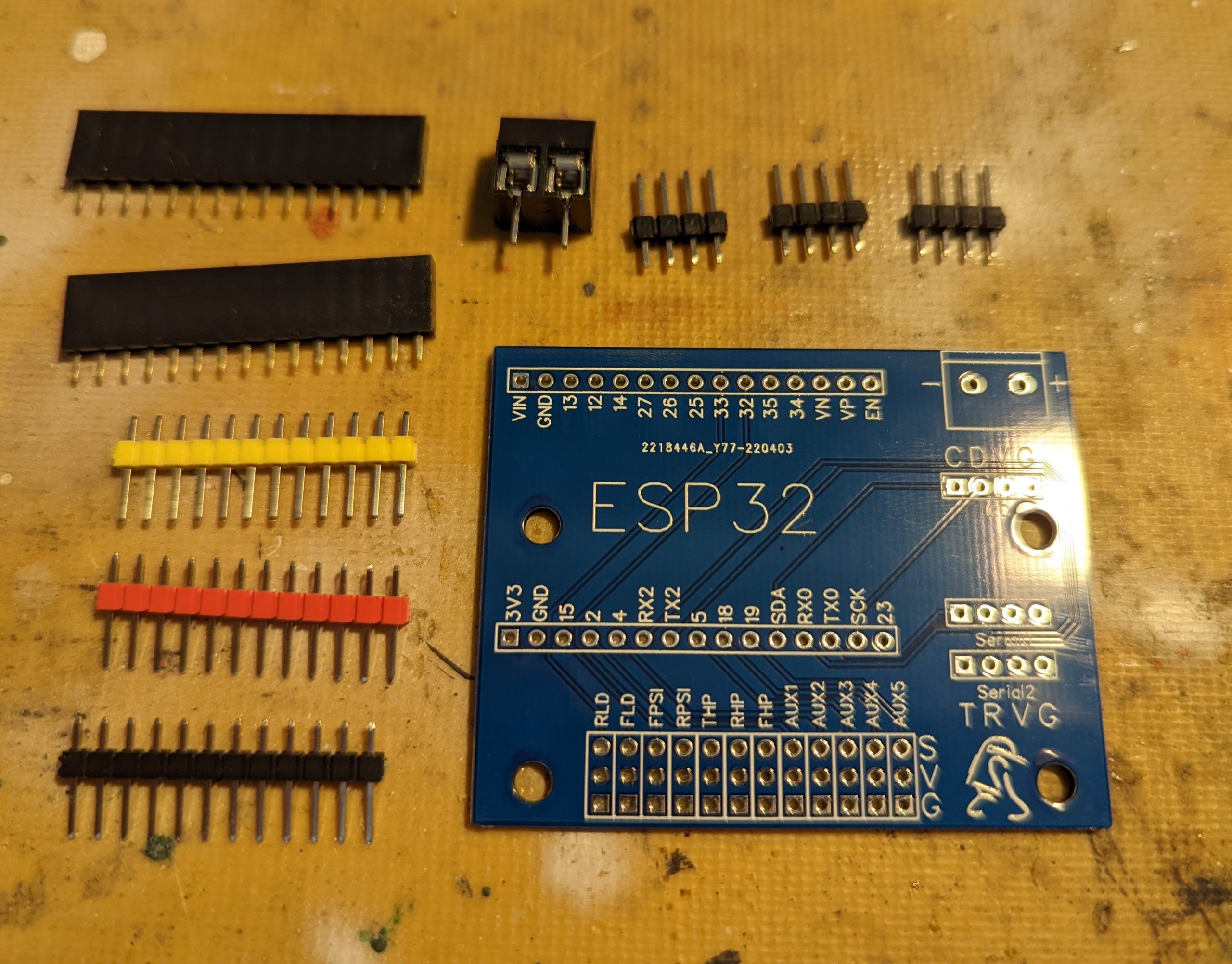
I don't offer unsoldered kits any more, I sold very few of them and it wasn't worth the hassle. There really isn't much to solder, but I put this quick…

The Astropixels come as a ready to use kit, just connect the cables and give them some power! I have previously offered unsoldered sets for a small discount, but few…
By default the AstroPixels will run standard R2 colours, with random HP lights. The code to do this is relatively simple and just a couple of dozen lines using the…