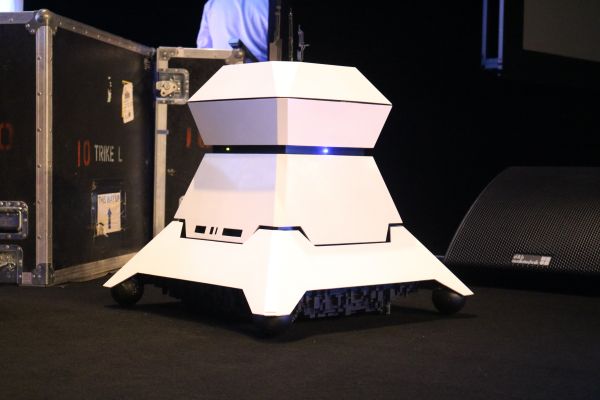
HO15 Sentry Droid with Autonomy
Well, its been a boring year with no droid outings, tho thanks to doing some live youtube events under the Droid Builders UK banner, we've managed to raise over £14k…
0 Comments
May 6, 2021
Well, its been a boring year with no droid outings, tho thanks to doing some live youtube events under the Droid Builders UK banner, we've managed to raise over £14k…