Budget Q85 Drive
The newer Q85 brushless drives are fast becoming a popular method for powering a droid, replacing the more standard brushed scooter motor (tho of course, we're builders so anything goes…
7 Comments
July 2, 2022
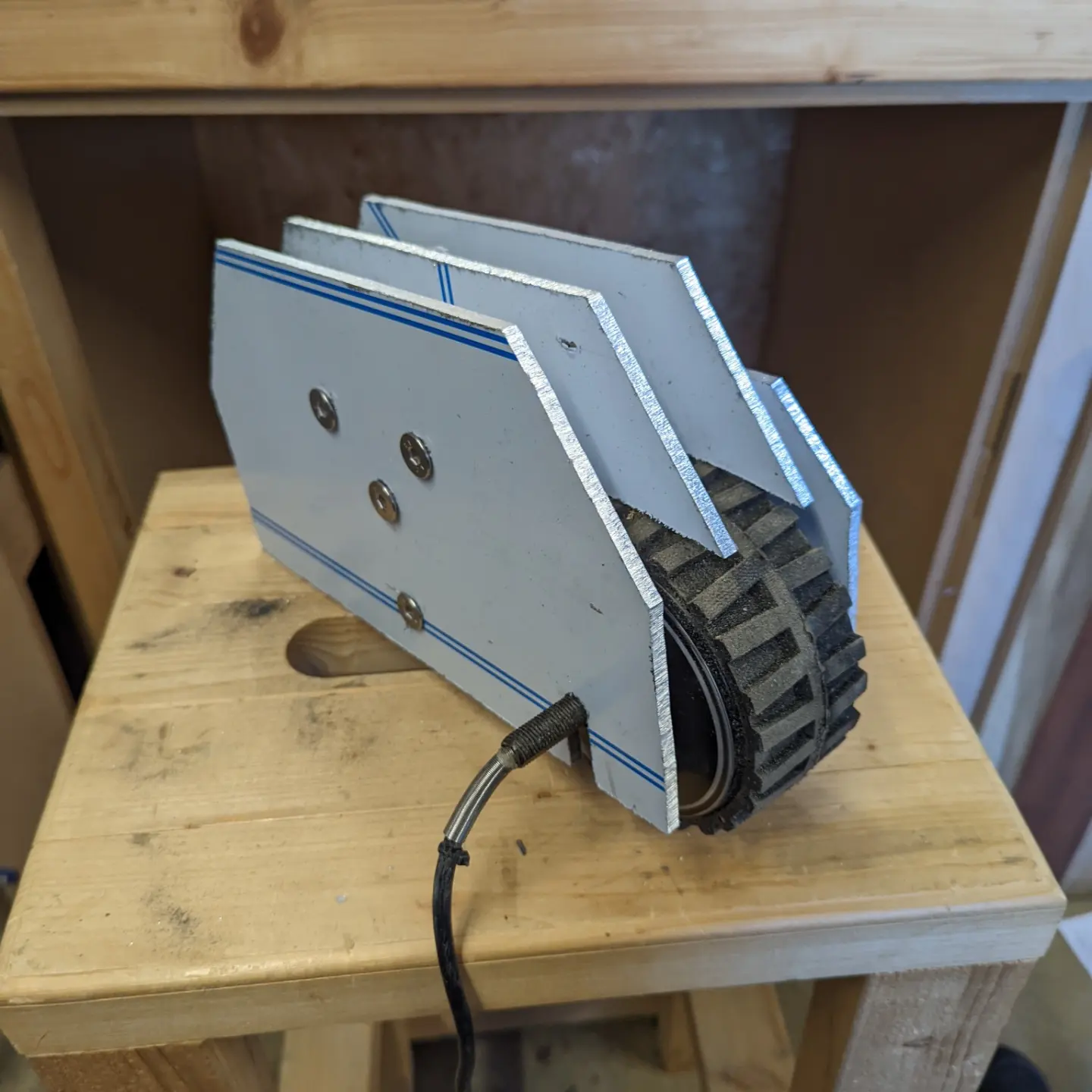
The newer Q85 brushless drives are fast becoming a popular method for powering a droid, replacing the more standard brushed scooter motor (tho of course, we're builders so anything goes…
I'm just about to do my first event of the year, and realised that two years ago at the same event, the organiser posted this picture: Setup time for Bolton…
Well, the connectors didn't turn up on Saturday, but they did turn up today! So after a bit of crimping, and a bit of soldering (and a few mistakes, but…
I'm going to have to give it a work in progress name, but its a bit difficult without even knowing what dome I'm doing! But anyway, I picked up the…
So, after Legoland in May, and again at MCM Manchester, R2's wheels have been scrubbed clean of all tread clear down to the plastic hubs. The first set of Banebot…
As mentioned in my previous post, R2's current main upgrade is to the center foot. The main parts to improve are the wheel, the shell, and the ankle attachment to…
The main issue R2 has at the moment is a rather dodgy center foot. For a start off, the shell is actually structural which I don't like. The shell is…