So, after BB8 sat with not much happening to it, I recently got a new RC controller and decided to reawaken the project.
Where had I got to?

I’ve had the drive system (Joe’s Drive) sat built and printed for quite a while, without any wiring or electronics on it. I knew I wanted to go down the true RC route, at least initially, rather than using my r2_control system. Unfortunately I’d just hit a wall with progress.
Along with that, I’d got a Cary Sphere. This is an injection molded system that produces a very strong ball that you cover with thin 3d printed panels. Due to shipping costs I’d actually done a deal with Cary and got five spheres sent over with the idea to redistribute the other four to builders in the UK. Helped keep the costs down.
Thats about as far as I’d got. The sphere was built, the drive mechanics were printed and sat there, but nothing else happened.
What changed?
The more I looked at it, the more maintenance on a droid built around the Cary sphere seemed like a real PITA. To get into the drive system it would take removing a number of panels, followed by a number of bolts to get into the sphere. This made not just the initial build and bug finding a real chore, but also the general maintenance.
From knowing how I am, that amount of work to fix a loose wire or even take out the batteries would mean the droid would just left neglected.
So What Now?
I’ve heard about the vonjet sphere more and more so decided to look into it. Its a fully 3d printed system, but more importantly it has two of the round panels as removable so you’ve easy access to the internals. Its a lot of printing, but I’ve just managed to get my corexy printer working again (with Klipper) and I might as well use it.
Where am I up to?
In the last few weeks I’ve made significant progress. Not just on the drive system, but also started printing the new sphere. Each segment takes a couple of days, and theres 14 segments in total (plus lots of random other things). Currently printing piece three, so still plenty of way to go.

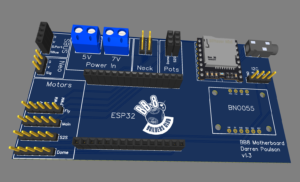
On the drive/control system I’ve actually mostly wired it up now, with main drive and side to side (s2s) working. All this is through an ESP32 using SBus from my RC controller. I’m currently working on a custom motherboard for the ESP32 to hold the IMU, MP3 player, and break out all the headers for things to connect in. I think I’ve now used every pin on the ESP32 for something!
Not only that, I’ve experimented with a few other things. Using ESPNow to a small ESP8266 (Wemos D1 Mini) with some neopixels hooked up I can make the dome PSI flash in time with the audio. There is also telemetry passing back to the controller so that I can get readings on the IMU state, battery, etc.
All code of course is in my github repository: https://github.com/dpoulson/bb8_rc_control