Astropixels FAQ
Just thought I'd do an FAQ covering some questions about build process, etc. General Why did you create the Astropixels?Initially to just have a go at designing PCBs. I did…
22 Comments
September 14, 2024

Just thought I'd do an FAQ covering some questions about build process, etc. General Why did you create the Astropixels?Initially to just have a go at designing PCBs. I did…

One of the great parts about the Astropixels is that whilst at the simplest you can just plug them in for basic R2 lights, you can also trigger various built…
So, I seem to be getting a bit of a name for myself with light kits. This weekend I was asked if I could do some lights for a DJ…

So, after BB8 sat with not much happening to it, I recently got a new RC controller and decided to reawaken the project. Where had I got to? I've had…

One of the things I advocate is the use of a big relay on your foot drives. Disconnecting the motors from the Sabertooth means that the droid can be pushed…
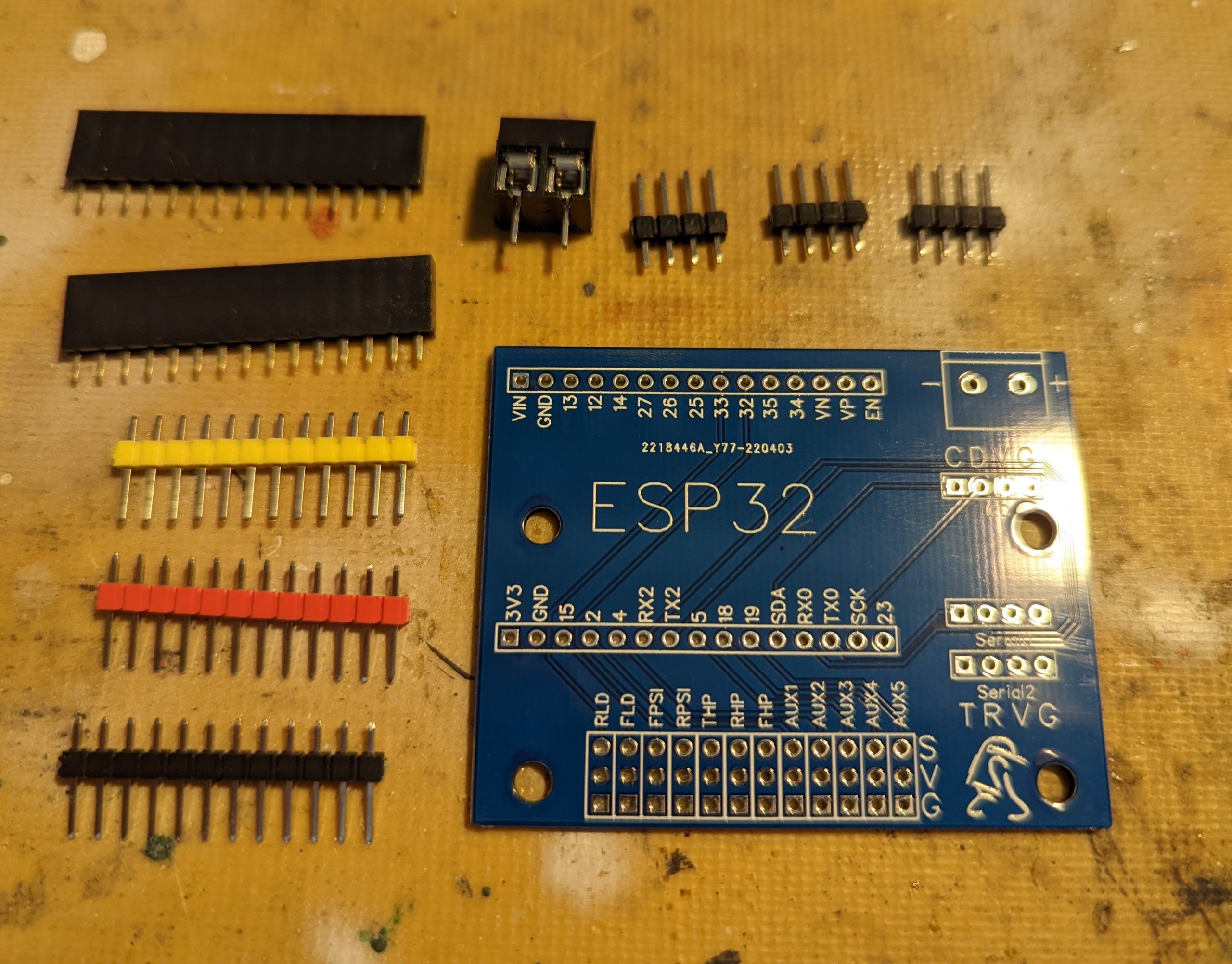
I don't offer unsoldered kits any more, I sold very few of them and it wasn't worth the hassle. There really isn't much to solder, but I put this quick…
By default the AstroPixels will run standard R2 colours, with random HP lights. The code to do this is relatively simple and just a couple of dozen lines using the…

After the success of producing the NeoPixel PSI boards, I wanted to do more. I wanted to do a simple, unified set of dome lights for a typical R2. And…
A few people have expressed an interest in my r2_control system, so I thought I'd do a post about how it works, and what it needs. At the core is…
Introduction The current state of PSI displays from the club are either simple TeeCees ones, or the VADER boards. I've had a couple of the VADER boards in R2 for…