Customising the Astropixels
Here I'll walk you through how to change a few aspects of your Astropixel setup so you can fine tune the settings to your liking. First step, you will need…
0 Comments
June 5, 2022

Here I'll walk you through how to change a few aspects of your Astropixel setup so you can fine tune the settings to your liking. First step, you will need…
I don't offer unsoldered kits any more, I sold very few of them and it wasn't worth the hassle. There really isn't much to solder, but I put this quick…

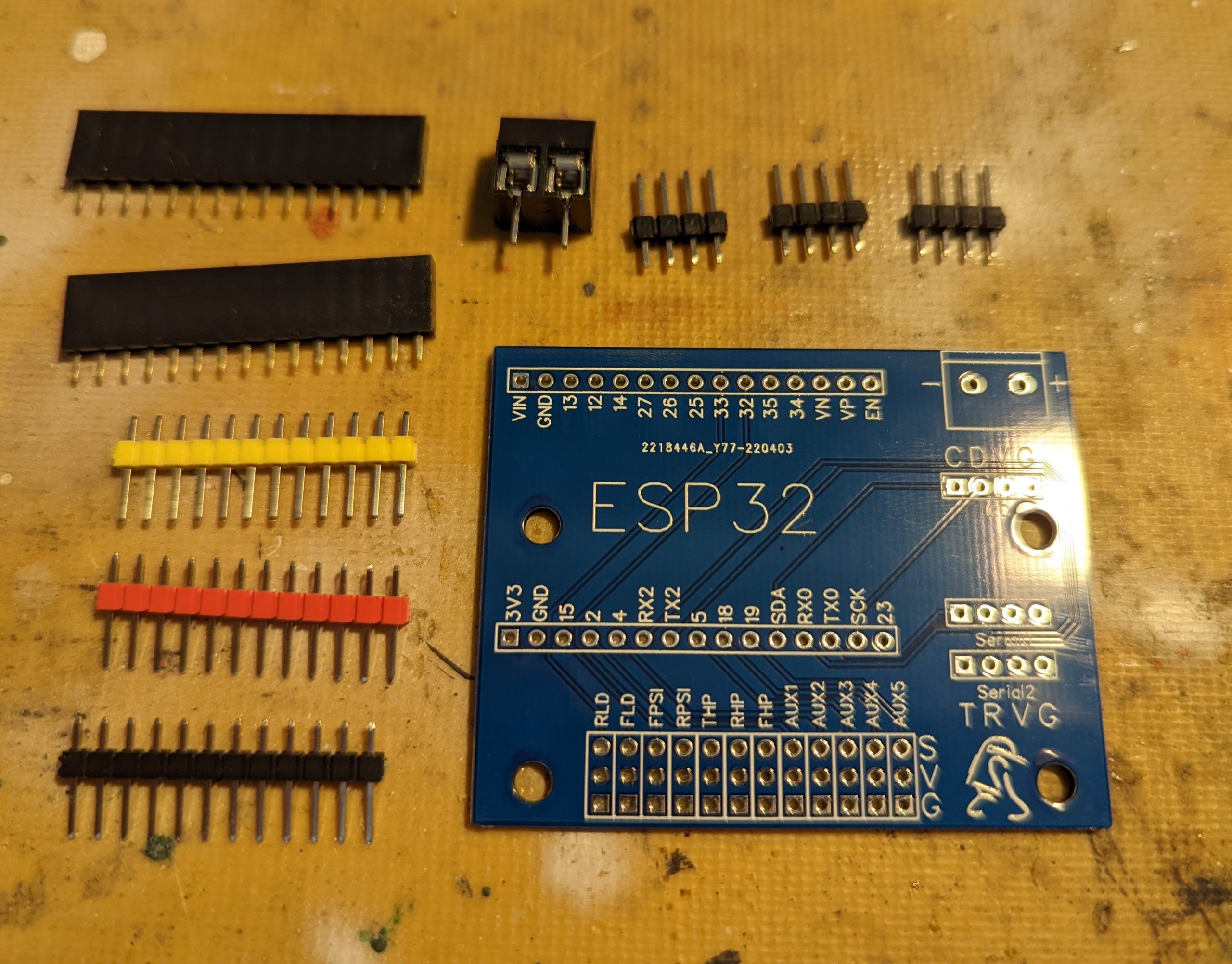
The Astropixels come as a ready to use kit, just connect the cables and give them some power! I have previously offered unsoldered sets for a small discount, but few…
By default the AstroPixels will run standard R2 colours, with random HP lights. The code to do this is relatively simple and just a couple of dozen lines using the…
For a bit of history and understanding as to my reasoning, check my previous post. https://www.youtube.com/watch?v=0WHzqFblB18 Components A standard R2 dome has 3 sets of lighting in it. There are…

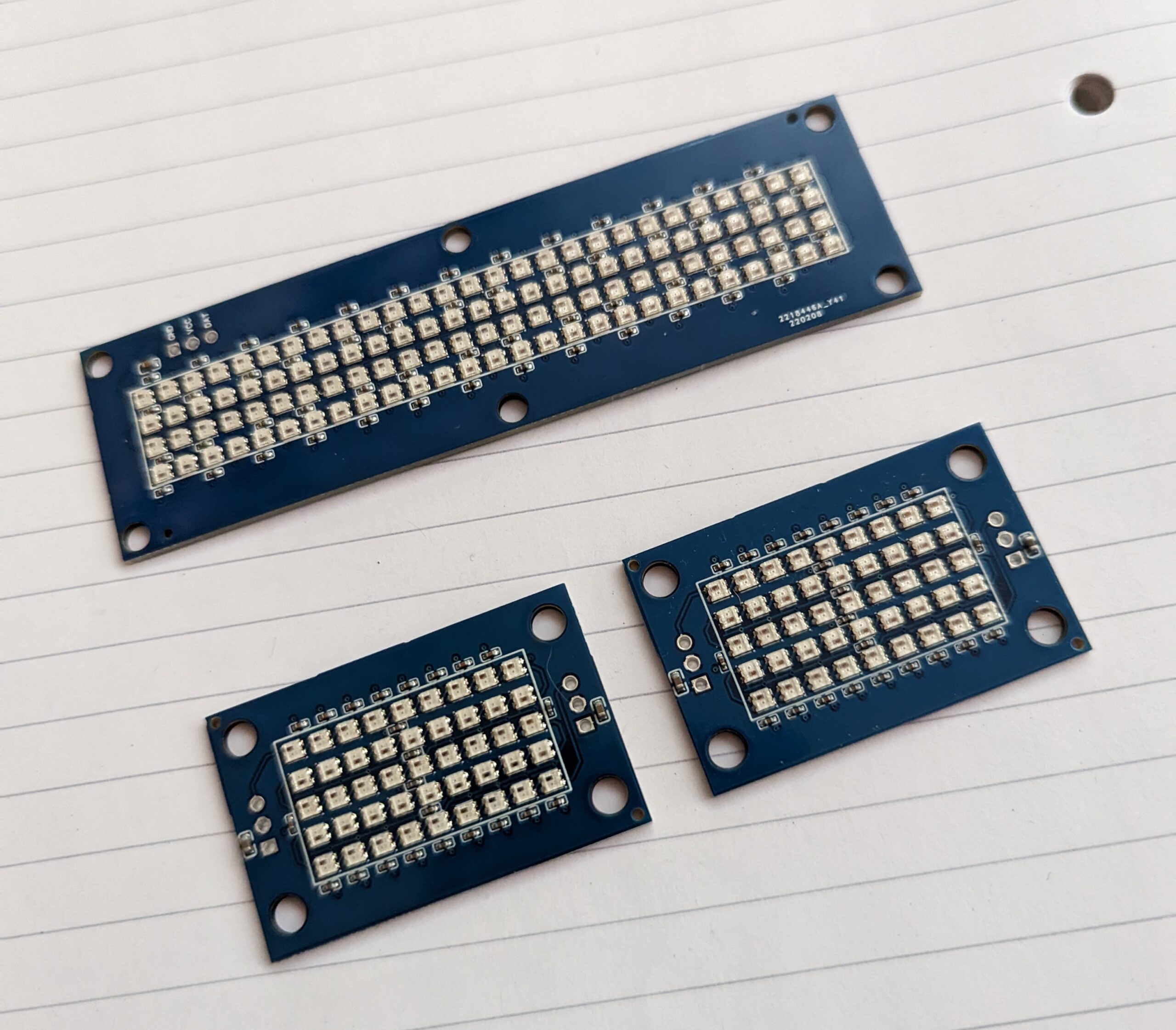
After the success of producing the NeoPixel PSI boards, I wanted to do more. I wanted to do a simple, unified set of dome lights for a typical R2. And…
Whilst doing the write up of my NeoPixelPSI boards I mentioned the ReelTwo library by Mimir a few times and thought I'd do a post about how I've been finding…
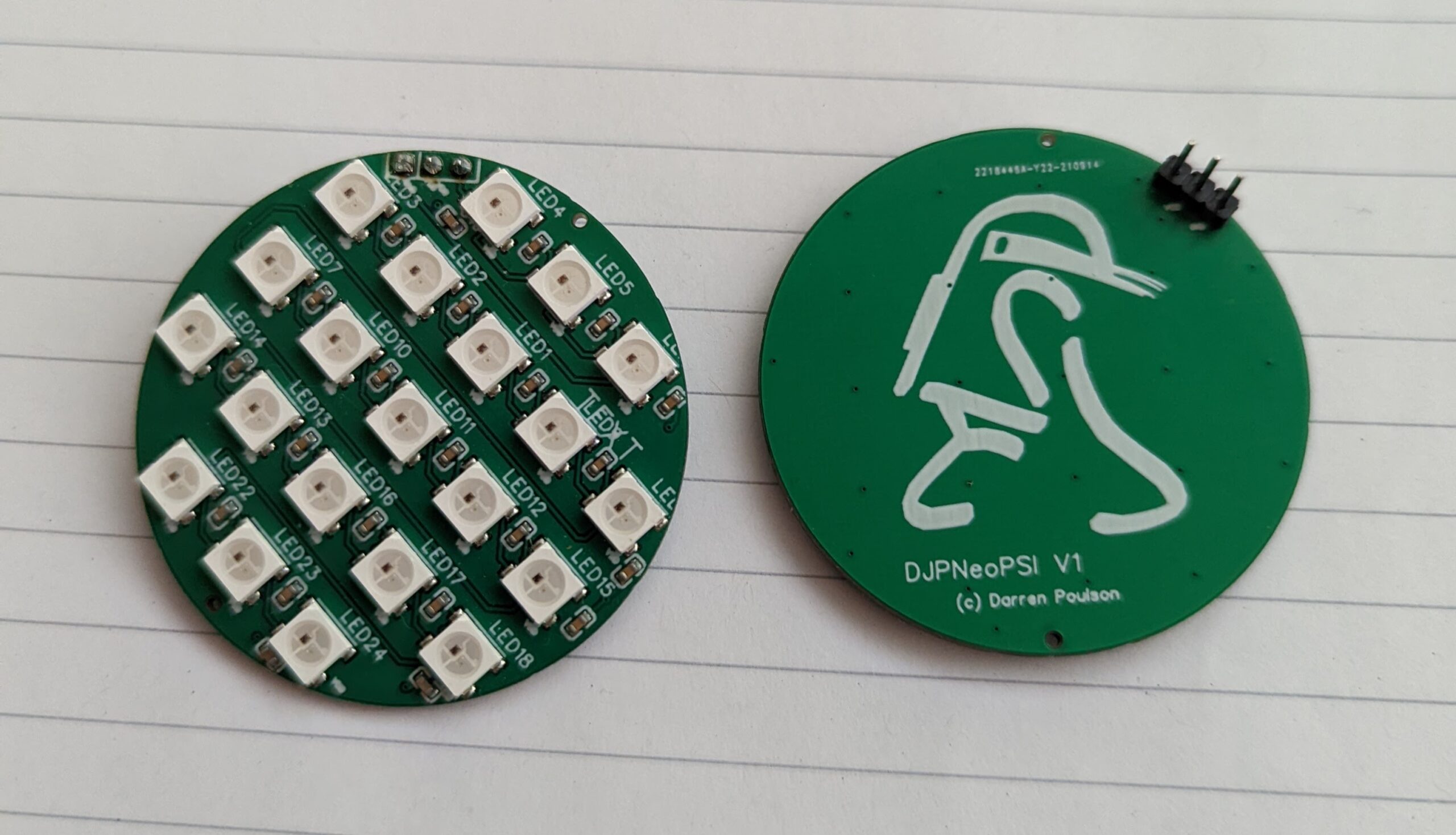
So, you've got your new PSI boards and have them mounted in your droid, now you need to get them to do things! Code Examples ReelTwo My preferred solution is…
I had a bunch of my lovely new PSIs, and had tested them with a example sketch to make sure they all worked. Next step was to write the code…

Something I've been meaning to do for a while was look at how to do a PCB with SMD layout that is now offered by a few of the cheap…