Astropixels FAQ
Just thought I'd do an FAQ covering some questions about build process, etc. General Why did you create the Astropixels?Initially to just have a go at designing PCBs. I did…
22 Comments
September 14, 2024

Just thought I'd do an FAQ covering some questions about build process, etc. General Why did you create the Astropixels?Initially to just have a go at designing PCBs. I did…
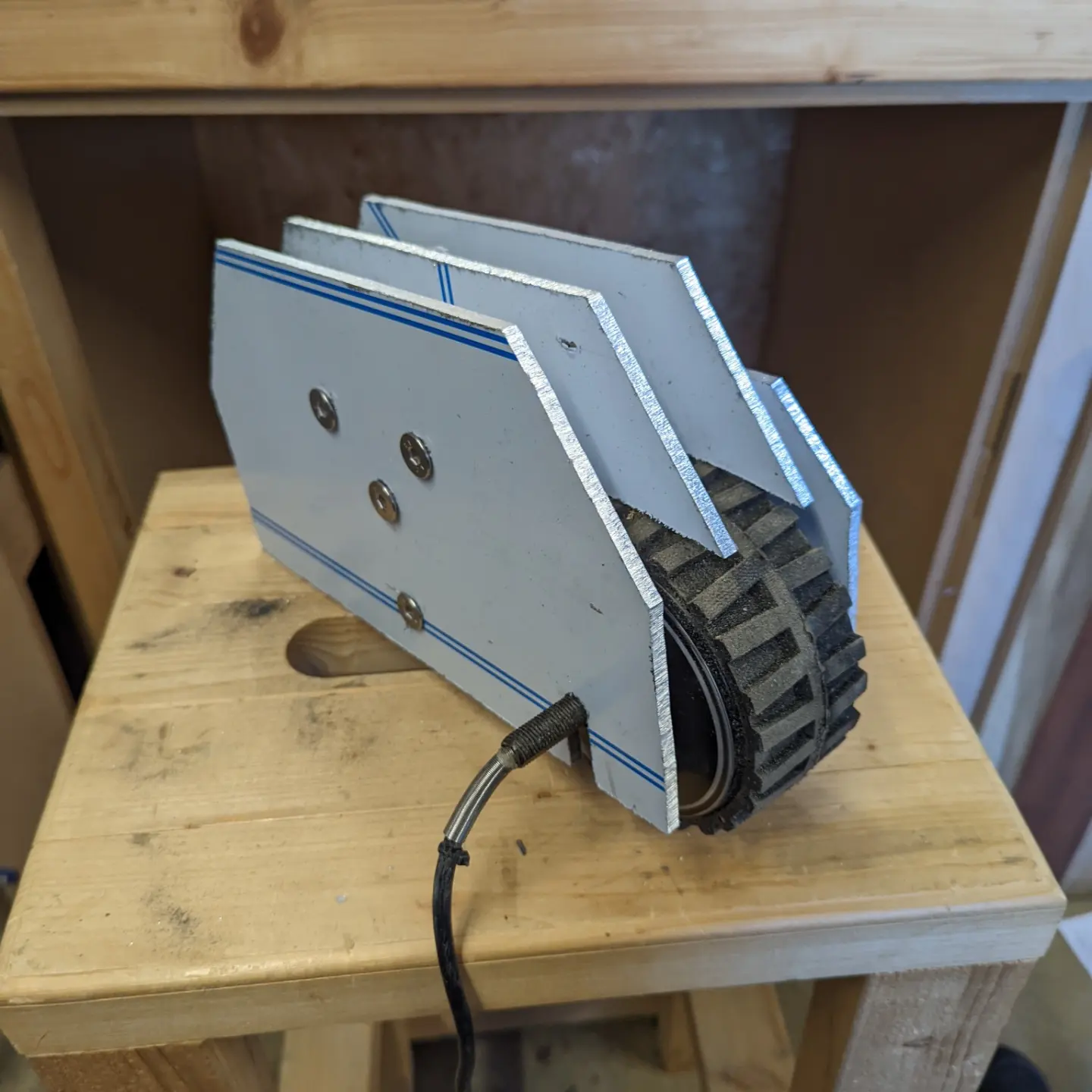
After a bit of testing and a couple of prototypes, I'm ready to release the flatpack drive files to the rest of the community. The idea behind these was to…

One of the things I advocate is the use of a big relay on your foot drives. Disconnecting the motors from the Sabertooth means that the droid can be pushed…

After the success of producing the NeoPixel PSI boards, I wanted to do more. I wanted to do a simple, unified set of dome lights for a typical R2. And…
So, sleep patterns are screwed. I'm totally knackered. The list of repairs needed for R2 is rather long. Must mean I've been at a convention! But not only a convention,…
After a busy, busy May, June has been a bit more relaxing. May was filled with events, not just with R2, and pretty much drained my (and R2's) batteries. Got…
This weekend was R2's first official outing with the UK R2 Builders. We were invited to attend Birmingham MCM Comic Con with the UK Garrison, an arm of the 501st…
There are many options for a battery to power an astromech, from the tried and tested Sealed Lead-Acid, to the latest LiFePO4. This article will look at utilising the very…
The day finally arrived. I was going to show off R2 to the public. Up until this point, he'd not been out of the garage and only had a handful…
This year has been a bit busy so far, and in February I realised I only had something like three free weekends to get R2 ready for his first outing,…